Automatización y robótica
Los alumnos de Ingeniería Eléctrica de la Facultad Cristian Rigano, Juan P. Bottani, Ariel Romano, y Rogelio Moro Zubillaga, coordinados por el profesor Ing. Omar Orqueda, realizaron dos proyectos: una silla de ruedas motorizada y un robot rastreador. En este segundo también participó la Srta. María L. Silva, alumna de Licenciatura en Organización Industrial.
Estos trabajos fueron publicados en el Congreso de la RPIC (Reunión de Trabajos en Procesamiento de la Información y Control) que se llevó a cabo los días 8, 9 y 10 de octubre en la Facultad Regional San Nicolás de la UTN. Transcribimos a continuación un resumen de ambos.
Silla motorizada

En este proyecto se desarrolló un sistema de control para una silla de ruedas motorizada basado en un PLC S7-212 de Siemens.
Los objetivos fundamentales de este proyecto consistían en lograr desarrollos tendientes a mejorar la calidad de vida de las personas y enseñar a los alumnos de la carrera mediante aplicaciones en problemas reales, que permitan integrar conocimientos de varias disciplinas en aplicaciones prácticas reales.
Para personas parapléjicas, ofrece la posibilidad del comando a través del clásico joystick , controlado manualmente. Para problemas de cuadriplejía, se puede comandar bucalmente, sobre una boquilla, mediante una cantidad determinada de soplidos y aspiraciones. Mientras que para personas con dificultades intermedias o especiales, existe la posibilidad de controlar la silla mediante una cierta cantidad de pulsos sobre un contacto.
Características
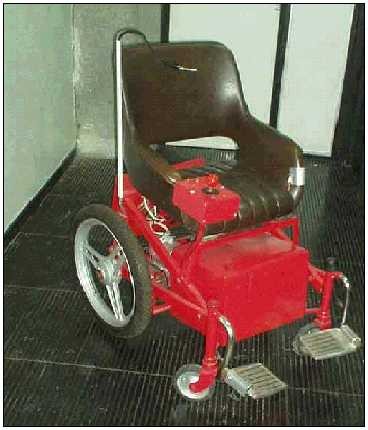
El proyecto se ha llevado a cabo sobre una silla de ruedas motorizada construida por alumnos y docentes de la especialidad Electromecánica de la Escuela de Educación Técnica N°1 «Crucero A.R.A. Gral. Belgrano» de Ing. White.
La silla está construida en caño estructural, con dimensiones estándar, diferenciándose solamente en un mayor ancho, dependiente del tamaño de las dos baterías de 12 voltios de automóvil que tiene colocadas bajo el asiento.
La tracción se obtiene con dos motores de corriente continua de 24V/1HP, con conexión en derivación. Delante del apoya-brazos derecho tiene montado el joystick , tres leds indicadores de funcionamiento y un botón de comando. En la parte posterior, se encuentra el gabinete eléctrico y, sobre un riel Din, están montados un PLC S7-212 de SIEMENS, cuatro contactores de potencia para el comando de los motores, el diafragma para el comando por soplos, el circuito electrónico y una protección electromagnética.
Movimientos
La silla de ruedas posee seis movimientos básicos: los cuatro clásicos de avance, retroceso, giro hacia la izquierda y hacia la derecha, más dos movimientos de giro corto hacia la derecha e izquierda. Para realizar estos movimientos, se activan los motores por medio del PLC y cuatro contactores trifásicos.
En el comando por aire, el programa del PLC cuenta los soplos y aspiración y, dependiendo del valor obtenido, realiza el movimiento correspondiente. Este sistema de control utiliza tres entradas: una de ellas es para el soplo, otra es para la aspiración y la tercera es para poder detener la marcha de la silla. Esta última entrada se encuentra activa cuando la boca está tocando la boquilla donde ingresa o egresa el aire y colocando la mano en la parte metálica que se encuentra en el asiento de la silla de ruedas. Para detener la marcha de la silla bastará con abrir el circuito de la boquilla.
En el comando por contacto, el programa cuenta la cantidad de cierres del circuito de la boquilla. Se debe mantener cerrado el circuito al realizar el último pulso de la secuencia deseada para que la función se realice. Se detendrá la marcha de la silla con la apertura del contacto.
La siguiente etapa de desarrollo consiste en reemplazar el PLC por un microcontrolador, con la finalidad de bajar costos de desarrollo e incrementar la versatilidad del sistema.
Desarrollo de un robot rastreador
 Construido con materiales en desuso, su construcción se basa en electrónica discreta, utilizando un PIC como procesador central, con programación de control, sensores ópticos y motores paso a paso.
Construido con materiales en desuso, su construcción se basa en electrónica discreta, utilizando un PIC como procesador central, con programación de control, sensores ópticos y motores paso a paso.
La robótica móvil es una temática de investigación y desarrollo de gran interés, tanto por la diversidad de aplicaciones, como por la gran cantidad de áreas de conocimiento que abarca, desde las ingenierías eléctrica, mecánica y electrónica, computación y biología. Un robot móvil es aquel que se puede desplazar en una gran zona total o parcialmente conocida, con autonomía parcial o total.
La función principal del robot que se desarrolló en este trabajo es el seguimiento de una línea de color blanco sobre un fondo de color negro.
Características Constructivas
El Robot tiene dos ruedas principales con aros de goma que sirven para parcializar el deslizamiento. La tracción es delantera buscando un mejor direccionamiento. Cada rueda se acopla a un motor paso a paso de 48 pasos y 12 voltios que permite una velocidad de máxima de 10 cm/seg. En la parte trasera del robot se encuentra una rueda libre con el fin de dar estabilidad mecánica.
El peso y las dimensiones físicas del robot son las siguientes.
Altura máxima = 8 cm Longitud = 16,5 cm Ancho = 10 cm Peso (sin baterías) = 800 gr
El robot realiza solamente tres movimientos: avance frontal, giros hacia derecha e izquierda.
Sensores
En este proyecto se han implementado dos clases de sensores para vincularse con el exterior: sensores de contacto y sensores infrarrojos. Los sensores de contacto tienen como función la detección de obstáculos sobre el camino marcado. Estos sensores son dos contactos que normalmente se encuentran cerrados, cada uno con un alambre helicoidal de 12 cm de largo, que otorga mayor distancia de detección. Cuando el Robot avanza y no encuentra ningún obstáculo, al microcontrolador le llega un nivel lógico igual a cero. Si en algún instante hay una obstrucción en el camino, los contactos se abren haciendo que al microcontrolador llegue un nivel lógico igual a uno. De esta forma, se indica la presencia de un problema y el robot detiene su marcha hasta que se libere el camino. Los sensores infrarrojos son los encargados del seguimiento de la línea. Se utilizan dos conjuntos fotodiodo-fototransistor extraídos de mouses de computadoras, pues permiten modificar la dirección de la trayectoria en forma dinámica con una construcción simple. Un conjunto de estos elementos se encuentra en el frente del robot para determinar cuándo el robot abandona la línea blanca. El principio de funcionamiento se basa en la emisión infrarroja de los fotodiodos: cuando la superficie es de color blanco, la emisión es reflejada casi en su totalidad, con lo que se excita el fototransistor hasta llevarlo a la condición de saturación, obteniéndose un valor lógico igual a uno en la entrada del microcontrolador. Si la superficie es de color negro, la reflexión será casi nula, quedando el fototransistor en corte y obteniéndose un cero como valor lógico.
La experiencia obtenida en la construcción del Robot ha motivado la organización en el mes de diciembre de una competencia de robótica para las escuelas de Nivel Medio de Educación. Con esta competencia, se espera fomentar la robótica en los alumnos del nivel polimodal para insertarlos en este fantástico mundo.


